Kapitel 1: Einleitung
Naturwissenschaftliche/technisch-physikalische Anwendungsgebiete verzeichnen eine zunehmende Mathematisierung - insbesondere im Zusammenhang mit der numerischen Simulation realer Prozesse, die auch die Tätigkeit des Ingenieurs eigentlich jeder Sparte betrifft. Das Streben, das Verständnis der „realen Welt“ auf virtuellem Wege zu vertiefen und zu erweitern, ist nicht nur ökonomisch motiviert, sondern resultiert auch aus Möglichkeiten, bisweilen in Bereiche vorstoßen zu können, die etwa experimentell nicht mehr zugänglich sind. Heutzutage gibt es deshalb wohl kaum einen Bereich der Wissenschaft oder des Ingenieurwesens, in dem keine Modellrechnungen betrieben werden. Die Numerische Mathematik liefert die Grundlagen zur Entwicklung entsprechender Simulationsmethoden, insbesondere zur Bewertung ihrer Verlässlichkeit und Genauigkeit. Am Ende möchte man möglichst verlässlich wissen, innerhalb welcher Toleranz das Ergebnis einer Rechnung von der Realität abweichen kann.
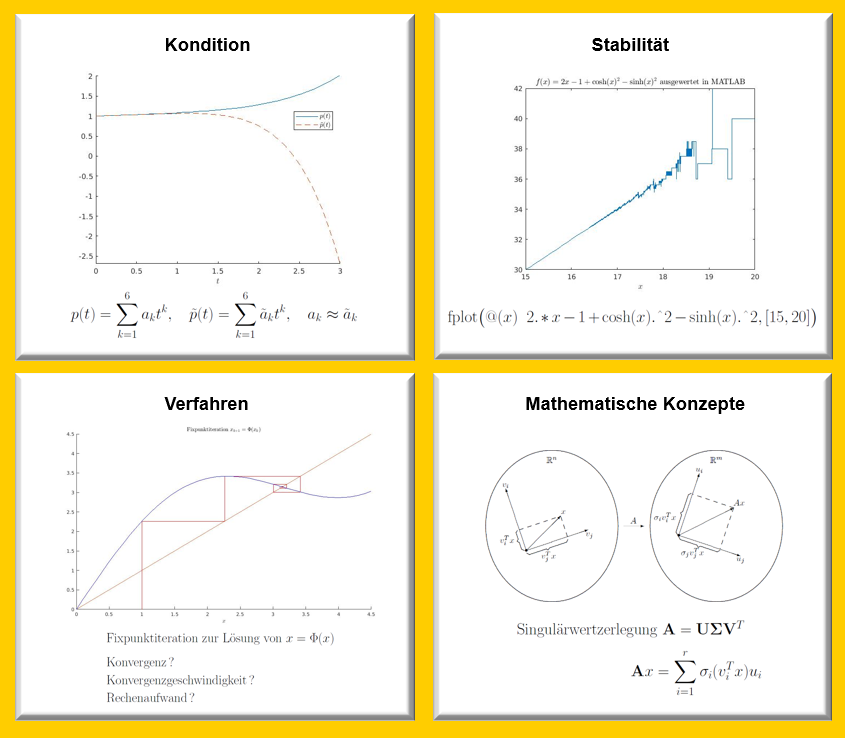
Kapitel 2: Fehleranalyse: Kondition, Rundungsfehler, Stabilität
Die Durchführung von Algorithmen auf digitalen Rechenanlagen führt fast immer zu Fehlern. Fehler im Ergebnis resultieren sowohl aus den Datenfehlern (oder Eingabefehlern) als auch aus den Fehlern im Algorithmus (Verfahrensfehlern und Rundungsfehlern). Gegenüber Datenfehlern sind wir im Prinzip machtlos, denn sie gehören zum gegebenen Problem und können oft nicht vermieden werden. Bei den Fehlern im Algorithmus haben wir jedoch die Möglichkeit, sie zu vermeiden oder zu verringern, indem wir das Verfahren verändern. Die Unterscheidung dieser beiden Arten von Fehlern wird uns zu den Begriffen Kondition eines Problems und Stabilität eines Algorithmus führen. In diesem Kapitel werden diese zwei für die Numerik zentralen Begriffe behandelt.
Kapitel 3: Lineare Gleichungssystem
Die mathematische Behandlung einer Vielzahl technischer/physikalischer Probleme verlangt
letztlich die Lösung eines Gleichungssystems, insbesondere die eines linearen Gleichungssystems. Beim Lösen linearer Gleichungssysteme unterscheidet man zwei Klassen von Lösungsmethoden, nämlich sogenannte direkte Verfahren und iterative Verfahren. Direkte Verfahren würden bei exakter Arithmetik die exakte Lösung liefern. Iterative Verfahren begnügen sich grundsätzlich mit einer Näherungslösung, deren Genauigkeit allerdings steuerbar sein soll. In diesem Kapitel werden wir uns mit direkten Verfahren zur Lösung von linearen Gleichungssystemen befassen.
Kapitel 4: Lineare Ausgleichsrechnung
Die mathematische Beschreibung physikalischer und technischer Prozesse beinhaltet typischerweise Parameter, die beispielsweise ein spezifisches Materialverhalten beschreiben, jedoch oft nicht bekannt sind. Sie müssen daher aus (notgedrungen fehlerbehafteten) Messungen ermittelt werden. In einer Vielzahl von Anwendungen geht es darum, aus einzelnen Messdaten auf zugrundeliegende funktionale Zusammenhänge zu schließen. Häufig liegt eine Situation vor, von welcher aus theoretischen Überlegungen bekannt ist, dass eine bestimmte Größe über einen gewissen funktionalen Zusammenhang von einigen Parametern abhängt. Eine wichtige Technik zur Bestimmung geeigneter Parameterwerte anhand von Messungen ist die Gaußsche Fehlerquadratmethode. In zahlreichen Varianten bildet dieses Prinzip der Ausgleichsrechnung die Grundlage für eine immense Vielfalt von Schätzaufgaben in vielen Anwendungsbereichen. In diesem Kapitel werden Ausgleichsprobleme untersucht, in denen das Modell linear in den Parametern ist. Numerische Verfahren zur Lösung solcher Probleme werden behandelt. Die mit dem linearen Ausgleichsproblem direkt zusammenhängende Singulärwertzerlegung wird erklärt.
Kapitel 5: Nichtlineare Gleichungssysteme
Die mathematische Behandlung einer Vielzahl technischer/physikalischer Probleme verlangt letztlich die Lösung eines nichtlinearen Gleichungssystems. Dazu verwendet man eine Lösungsstrategie, die auf dem Prinzip der Iteration beruht. Bei iterativen Methoden bestimmt ein Grenzprozess die exakte Lösung. Für die Praxis ist es entscheidend, diesen Grenzprozess genau zu verstehen, um bei einem (praktisch unvermeidbaren) Abbruch der Iteration nach endlich vielen Schritten sicher zu stellen, dass die gegenwärtige Annäherung genügend genau ist. In diesem Kapitel werden mehrere iterative Verfahren zur Lösung nichtlinearer Gleichungssysteme, wie z.B. die Fixpunktiteration und das Newton-Verfahren, behandelt.
Kapitel 6: Nichtlineare Ausgleichsrechnung
Die mathematische Beschreibung physikalischer und technischer Prozesse beinhaltet typischerweise Parameter, die beispielsweise ein spezifisches Materialverhalten beschreiben, jedoch oft nicht bekannt sind. Sie müssen daher aus (notgedrungen fehlerbehafteten) Messungen ermittelt werden. In einer Vielzahl von Anwendungen geht es darum, aus einzelnen Messdaten auf zugrundeliegende funktionale Zusammenhänge zu schließen. Häufig liegt eine Situation vor, von welcher aus theoretischen Überlegungen bekannt ist, dass eine bestimmte Größe über einen gewissen funktionalen Zusammenhang von einigen Parametern abhängt. Eine wichtige Technik zur Bestimmung geeigneter Parameterwerte anhand von Messungen ist die Gaußsche Fehlerquadratmethode. In zahlreichen Varianten bildet dieses Prinzip der Ausgleichsrechnung die Grundlage für eine immense Vielfalt von Schätzaufgaben in vielen Anwendungsbereichen. In diesem Kapitel werden allgemeine nichtlineare Ausgleichsprobleme untersucht. Numerische Verfahren zur Lösung solcher Probleme, insbesondere die Gauß-Newton- und Levenberg-Marquardt-Verfahren, werden behandelt.
Kapitel 7: Eigenwertprobleme
In diesem Kapitel befassen wir uns mit der Eigenwertgleichung Av=λv (mit einer reellen quadratischen Matrix A). Gesucht werden die Zahl λ (Eigenwert) und der Vektor v (Eigenvektor zum Eigenwert λ). Solche Eigensysteme beschreiben zum Beispiel Schwingungsvorgänge in mechanischen Systemen. In diesem Kapitel werden grundlegende Eigenschaften dieser Problemstellung (Kondition, Eigenwertabschätzungen, Schur-Faktorisierung) behandelt und Verfahren zur iterativen Berechnung der Eigenwerte erklärt. Insbesondere wird das sogenannte QR-Verfahren zur Bestimmung aller Eigenwerte einer Matrix ausführlich behandelt. Außerdem wird ein wichtiger Zusammenhang zwischen den Eigenwerten einer Matrix und den Nullstellen eines speziellen Polynoms untersucht.
Kapitel 8: Interpolation
Allgemein besteht das Interpolationsproblem darin, zu einer skalaren Funktion f, die nur an diskreten Stellen ausgewertet wird, eine einfachere Funktion g zu finden, die mit der gegebenen Funktion f an den besagten Stellen übereinstimmt und sich ansonsten an beliebigen Zwischenstellen auswerten lässt. Der konzeptionell einfachste Fall ist der, bei dem g ein Polynom ist, das die Funktionswerte von f an den diskreten Stellen interpoliert. Diese sogenannte Lagrange-Interpolationsaufgabe mit Polynomen wird in diesem Kapitel behandelt. Eine weitere für die Praxis sehr relevante Klasse von Interpolationsmethoden ist die der trigonometrischen Interpolation. Diese Methoden werden zur Interpolation (oder Approximation) periodischer Vorgänge benutzt. Einen wichtigen Anwendungshintergrund stellt hierbei die Signalverarbeitung (Zeitreihen) dar, insbesondere im Zusammenhang mit der Fouriertransformation, welche eine Zerlegung periodischer Funktionen in „Grundschwingungen“ ist. Die mit dieser Technik zusammenhängenden numerischen Verfahren werden in diesem Kapitel erklärt.
Kapitel 9: Splinefunktionen
In verschiedenen Anwendungen, wie etwa beim Entwurf von Karosserieteilen oder Schiffsrümpfen, sind typischerweise sehr viele Daten zu interpolieren. Die in Kapitel 8 behandelten Lagrange-Interpolationspolynome liefern bei solchen Anwendungen in der Regel keine befriedigende Lösung, weil Polynome hohen Grades zu starken Oszillationen neigen. Die Splinefunktionen, mit denen wir uns in diesem Kapitel beschäftigen werden, bilden ein sehr viel geeigneteres Hilfsmittel als Polynome, um größere Datenmengen an beliebigen Stützstellen zu interpolieren. Grundlegende Eigenschaften der Splinefunktionen und die Anwendung dieser Funktionen bei Interpolations- und Approximationsaufgaben werden in diesem Kapitel behandelt.
Kapitel 10: Numerische Integration
Integrale sind in den seltensten Fällen analytisch direkt berechenbar. Die numerische Berechnung von Integralen (auch Quadratur genannt) ist eine der ältesten Aufgaben in der numerischen Mathematik. In diesem Kapitel werden Methoden zur Lösung dieser Aufgabe diskutiert. Wir konzentrieren uns zunächst auf einige wichtige Grundprinzipien der Konstruktion von Näherungsformeln für ein eindimensionales Integral. Wir werden zwei Klassen von Quadraturformeln behandeln, nämlich die sogenannten Newton-Cotes-Methoden und die Gauß-Quadratur, welche sich vor allem in der Wahl der Stützstellen unterscheiden. Wir werden das Konzept der wiederholten Quadratur erklären. Basierend auf Fehlerschätzungstechniken kann eine berechnete Integralapproximation mit einer geeigneten Korrektur wesentlich verbessert werden. Diesen Korrekturschritt kann man sogar wiederholen, was auf die allgemeine Technik der Extrapolation führt, welche wir genauer erklären werden.
Kapitel 11: Gewöhnliche Differentialgleichungen
In diesem Kapitel geht es um die numerische Behandlung gewöhnlicher Differentialgleichungen, welche die „zeitliche“ Änderung einer oder mehrerer Zustandsgrößen charakterisieren. Man kann damit dynamische Systeme beschreiben, die beispielsweise in der Mechanik ebenso wie bei chemischen Reaktionen auftreten oder auch die Ausbreitung von Epidemien modellieren. Wir werden zunächst einige für diese Aufgabe relevante (theoretische) Grundlagen, z.B. zur Kondition und zur Existenz und Eindeutigkeit von Lösungen, sammeln. In diesem Kapitel wird eine Reihe numerischer Verfahren zur Approximation der Lösung dieser Aufgabe behandelt, zum Beispiel die einfachen Euler-Verfahren, die Runge-Kutta-Einschrittverfahren und einige Klassen von linearen Mehrschrittverfahren. Wir werden die sogenannten steifen gewöhnlichen Differentialgleichungen genauer untersuchen und insbesondere erklären, welche numerischen Verfahren für solche Probleme gut geeignet sind.